The Omnirotor Platform
Mobile and aerial robots offer many potential applications, including warehouse logistics, surveillance, cinematography, and search and rescue. However, most such robots are task-specific and generally lack the versatility to tackle multiple scenarios, terrains, and unstructured, dynamic environments. The Omnirotor platform is a versatile, multi-modal, coaxial, tilt-rotor, all-terrain vehicle that combines an Unmanned Aerial Vehicle (UAV) and an Unmanned Ground Vehicle (UGV) into a hybrid, all-terrain vehicle. The Omnirotor has two locomotion modes of operation (aerial and ground vehicle) and five operational configurations, as it can fly both in the Normal and Inverted configurations and drive on the ground in the Normal and Inverted configurations. It can also recover from any non-operational state to its Normal, upside-down configuration. Moreover, in addition to the locomotion modes, the continuous omnidirectional thrust vectoring enables the Omnirotor platform to perform complex manipulation of objects.
During my Ph.D. I developed three versions of the vehicle, in the tentative to improve the concept.
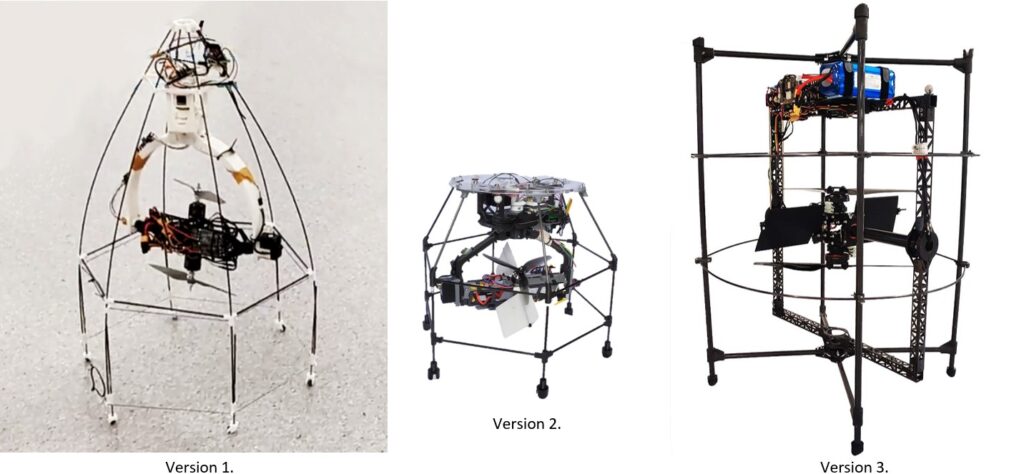
In the second version of the Omnirotor, I demonstrated its both locomotion modes, both flying and and driving on the ground, exploring a search and rescue scenario where the vehicle saves energy by driving on the ground, and flyies only when it finds an obstacle it can not cross.
In the third and final version of the prototype I created a wire untwisting mechanism that allowed the battery to be placed further away from the motors, increasing the distance of the center of mass from the propellers and improving control authority.
The video below was awarded IEEE Access Best Video Award, Promotional Prize Winner.
Publications
[3] J. Buzzatto and M. Liarokapis, ’The Omnirotor Platform: A Versatile, Multi‑Modal, Coaxial, All‑Terrain Vehicle,’ in IEEE Access, vol. 11, pp. 27928‑27941, 2023, doi: 10.1109/ACCESS.2023.3258401.
[2] J. Buzzatto, P. H. Mendes, N. Perera, K. Stol, and M. Liarokapis, ‘The new dexterity omnirotor platform: Design, modeling, and control of a modular, versatile, all‑terrain vehicle’, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021, pp. 6336–6343
[1] J. Buzzatto and M. Liarokapis, ‘An agile, coaxial, omnidirectional rotor module: on the development of hybrid, all terrain robotic rotorcrafts’, IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), 2020, pp. 162–168.