Joao Buzzatto
I am a Postdoctoral Associate at the Massachusetts Institute of Technology (MIT), at The 77 Lab. I have a diverse background with experience in aerial robotics, soft robotics, and manipulation. I am passionate about developing versatile robotic systems with unique capabilities that challenge what is possible. Currently, I am doing research in motor skill acquisition through haptic guidance.
Education
Postdoctoral Associate
Massachusetts Institute of Technology, USA
The 77 Lab
Developing systems to study motor learning though haptic guidance.

Ph.D.
University of Auckland, New Zealand
New Dexterity Research Group
Developed versatile hybrid aerial and ground vehicles for manipulation and soft, lightweight kirigami grippers.
BS and MS
University of Sao Paulo, Brazil
Robotic Manipulation Lab
Developed concepts and controllers for aerial manipulation.
Research Projects

Haptic Operation of Heavy-Machinery
The average professional excavator operator goes through about 4-5 years of training to develop the skill need to succeed in the job. This project investigates the effects of haptic feedback and guidance on skill acquisition.
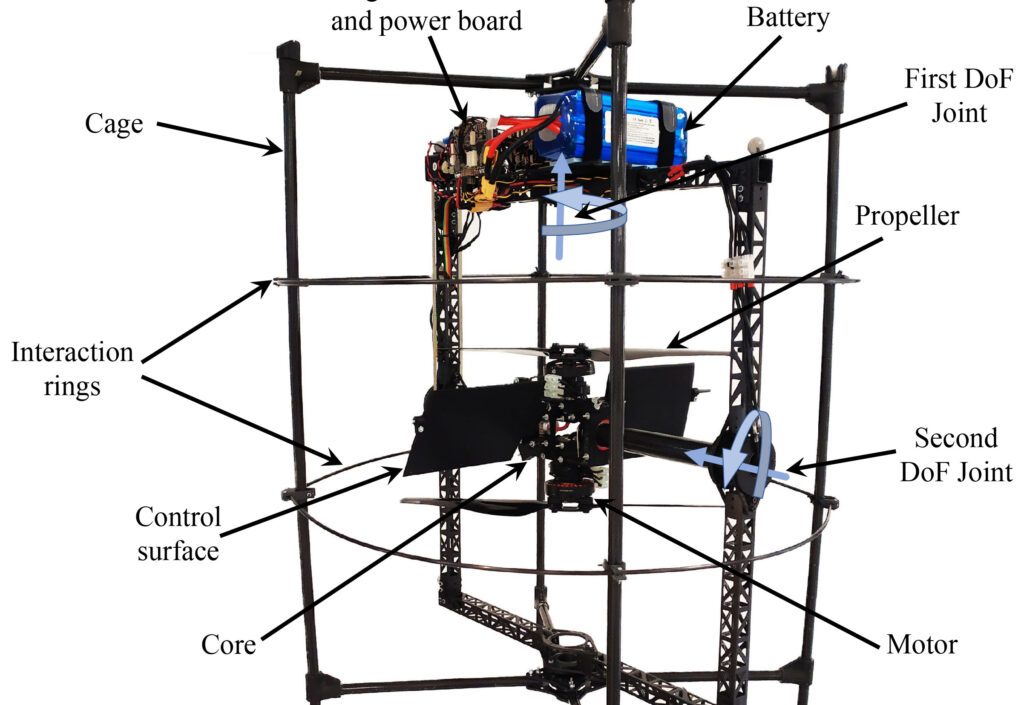
The Omnirotor was an exercise of trying to imagine what the most versatile aerial vehicle could look like. By looking into the basic building block of multirotor UAV, the rotors, we attempted to create the most versatile rotor, which led to the hybrid vehicle concept that can apply its full thrust in any direction, fly, and move on ground.
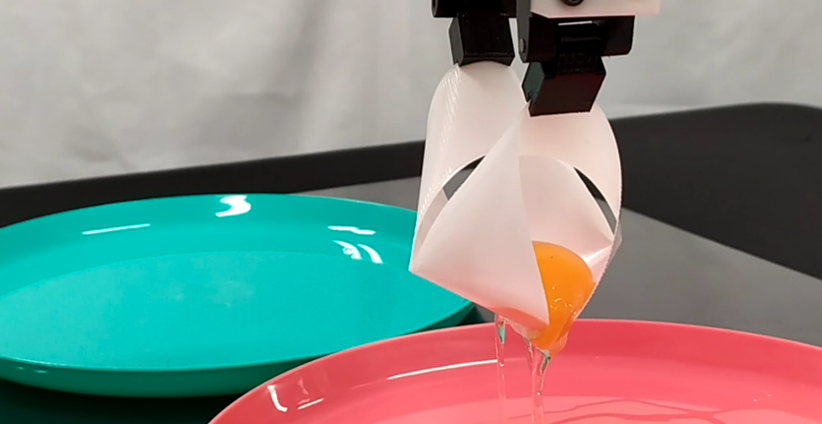
Kirigami Grippers for Delicate Manipulation
Soft grippers enable simple compliant manipulation. Traditional rigid robots require special controllers to enable compliant interaction. Kirigami grippers are a novel approach to achieving ultra-delicate grasping that is based on the Japanese art of cutting and folding paper, which transforms 2D sheets of materials into complex 3D shapes.
Haptic Glance with Kirigami Grippers
Kirigami grippers are soft, continuous, infinite-dimensional systems that conform to the object’s shape during grasping. By sensorizing the gripper and measuring its deformation, we use AI to learn to recognize objects with a single grasp.


Soft Aerial and Ground Manipulation
Animals are versatile creatures capable of multiple modes of locomotion and often of manipulation. This work demonstrates how a single platform can exploit its multi-modal versatility to perform multi-modal manipulation when equipped with a soft, lightweight gripper.
Control Allocation for Efficient Coaxial Rotors
Coaxial rotors are a compact arrangement of rotors that offer superior thrust capacity per area, enabling small but powerful drone designs. However, such an arrangement is notoriously inefficient when compared to ‘flat’ rotors. This work provides a control method to improve the efficiency of coaxial rotors by up to 11%.


Aerial Perching for Power Line Inspection
Electric power lines are extensive, fundamental structures that age and demand continuous inspection and maintenance. This project proposes an autonomous perching UAV with a specialized gripper that can attach to power lines and drive along them, saving energy while inspecting for defects and wear.
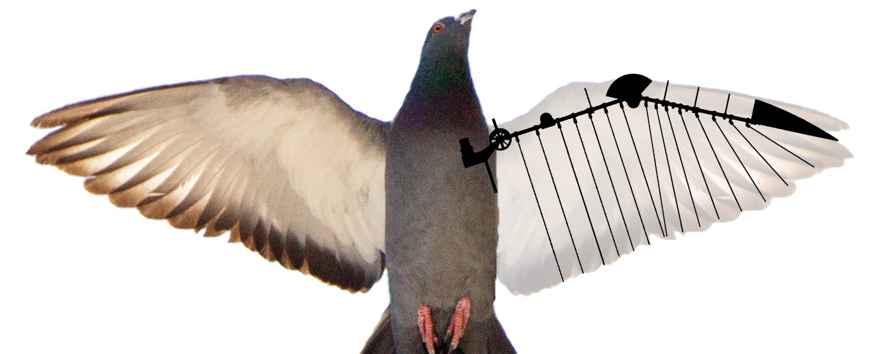
Bio-Inspired Morphing Wings for VTOL Quadrotor
Multi-rotor UAVs, such as quadrotors, are excellent at hovering and are well suited to navigate space-constrained environments, such as indoors. However, they suffer from low range when compared to fixed-wing vehicles. Fixed-wing and other hybrid VTOL aircraft display longer flight range but are generally unsuited for flight indoors or in constrained spaces. Here, we propose a morphing wing attached to a quadrotor, which can increase the vehicle’s flight range when extended and still allow the exploration of space-constrained environments when the wings are contracted, offering unique advantages for search-and-rescue scenarios.
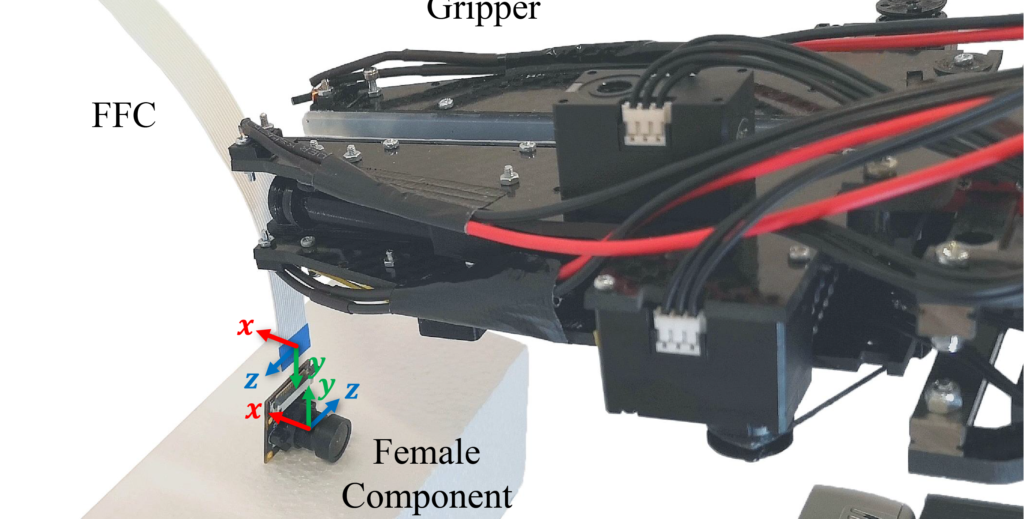
Flat-Flexible-Cable Manipulation and Assembly with Multi-Modal Gripper
This project addresses the challenges of robotic manipulation and assembly of flexible flat cables (FFCs) by developing a multi-modal robotic gripper with locally-dexterous tips and active fingernails. Integrating CAD-based pose estimation and multiview fusion, the system achieves precise cable handling and insertion, demonstrating a 99.75% success rate in various industrial tasks.