
Control Allocation for Coaxial Rotors
Coaxial rotors used on multirotor Micro Aerial Vehicles (MAVs) are complex aerodynamic systems that are typically treated in a simplified manner, operating in sub-optimal conditions. In this work, we propose: i) an open-source benchmarking platform for coaxial rotor systems that allows us to analyze and improve their efficiency and ii) a map of the whole actuation domain of coaxial systems based on extensive experimentation. In particular, we test three systems built using off-the-shelf components and different rotor configurations. Results demonstrate the existence of a maximum efficiency boundary, which covers the whole thrust range of each system. We also analyze how this boundary changes with respect to the rotor configuration. We compare it with the performance of coaxial rotors controlled with the current standard method (i.e., equal commands for both rotors). Finally, we propose a control allocation strategy that improves the efficiency of coaxial rotors by up to 11% over the current industry standard. Implementation on an octocopter with four sets of coaxial rotors validates the proposed methods across two different rotor separation designs and two different payload scenarios.
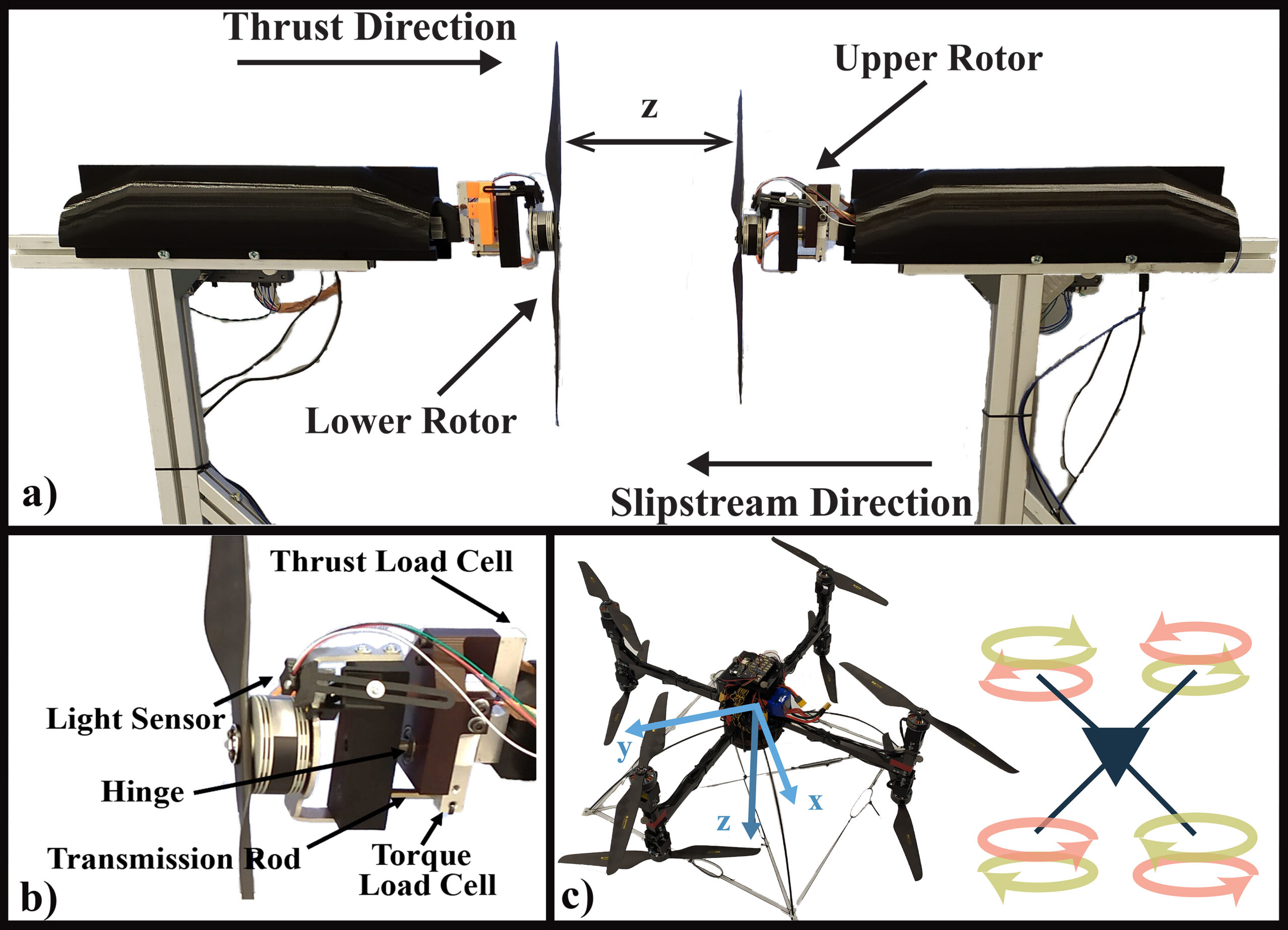
This figure shows the benchmarking platform used in the study. It includes details on the sensors used, and information on the octocopter used in testing.
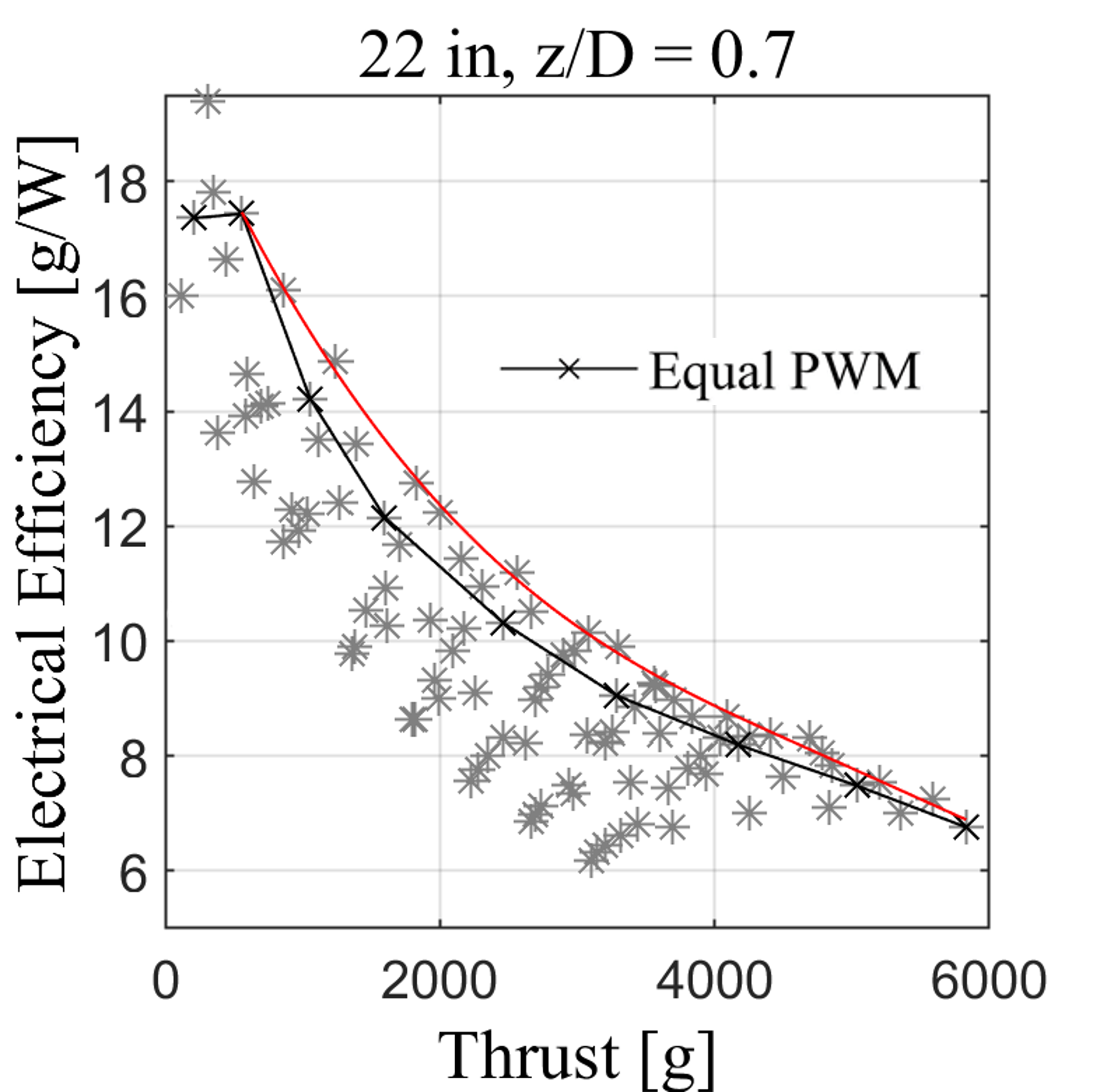
This image illustrates one the main contributions of the work, which its the visualization of a maximum efficiency ceiling for the coaxial rotor system, displayed by the red line in the plot, followed by the black line, which displays the industry standard way of controlling coaxial rotors.
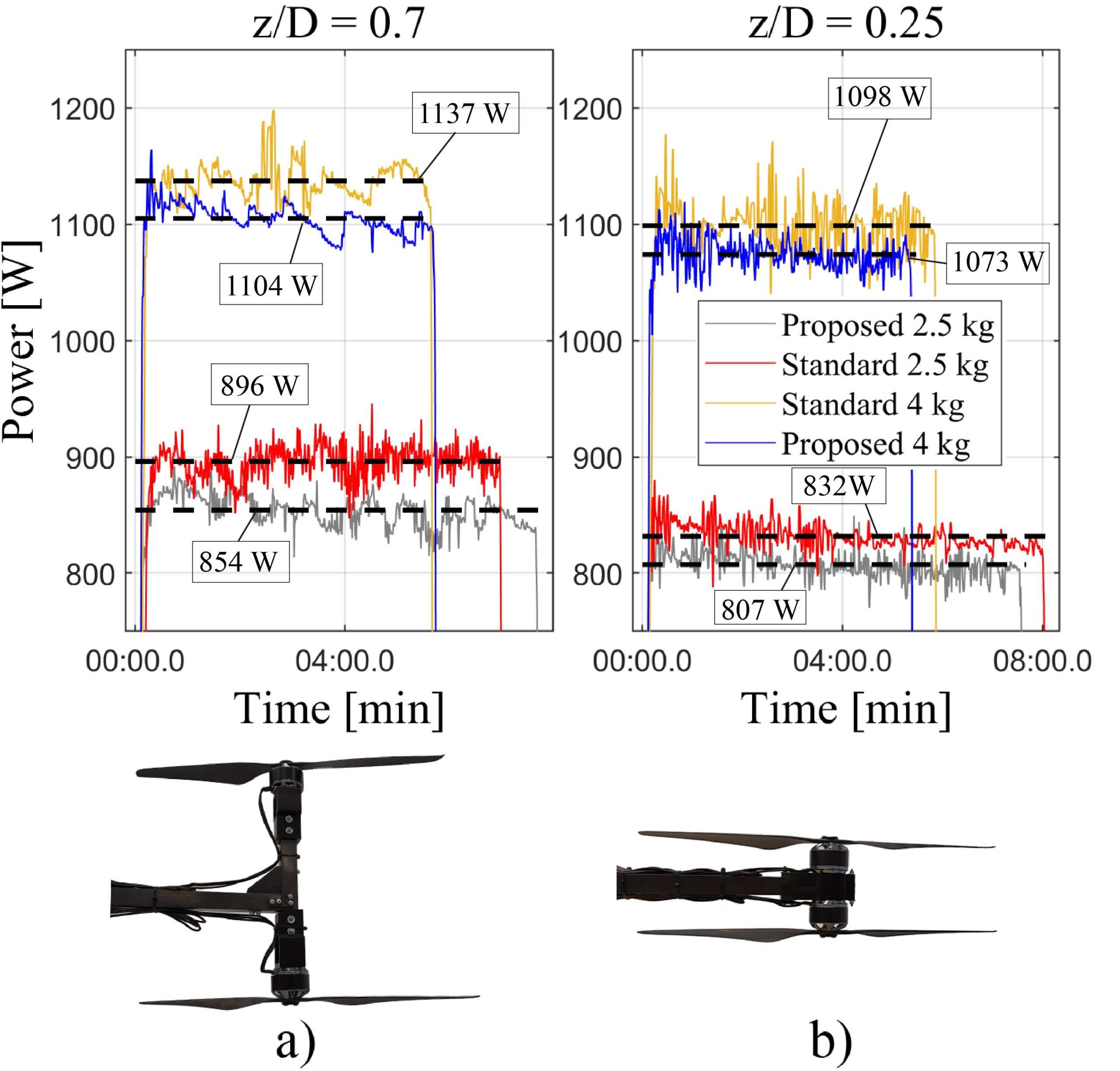
Finally, here we show the results of the implementation of the proposed control allocation methods that tracks the efficiency ceiling on octocopter. We tested two propeller separations, each with two weights. The plots show the power consumption with our proposed method and without. Our method saves a substantial amount of energy compared to the baseline.
Publications
[1] J. Buzzatto and M. Liarokapis, ‘A Benchmarking Platform and a Control Allocation Method for Improving the Efficiency of Coaxial Rotor Systems’, IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 5302–5309, 2022.